 DJI Enterprise Dealer
DJI Enterprise Dealer
The Professional's Source for Drones
Sign In or Create Account 丨 1.888.557.6791
X-Droners
认证商家
DJI Enterprise Dealer
X-Droners
认证商家
自发布以来,经纬 M300 RTK 就凭借其强大性能、长续航和集成能力,成为消防、巡检、测绘等领域最“称手”的无人机平台之一。潜能满满,仍未完全释放。
新年伊始,我们再次迎来经纬 M300 RTK 的软硬件“进化”——新固件升级,支持DJI P1 及环扫毫米波雷达。这将为测绘、巡检等领域的无人机作业,带来广阔的新空间。

看看这次固件升级有哪些亮点?
1. 支持 DJI P1
新增支持 DJI P1 负载相机。这将使经纬 M300 RTK 的航测能力迈入全新纪元。DJI P1 集成了 4500 万像素全画幅传感器、三轴云台,支持多款定焦镜头,配合大疆智图软件,是一个适用于大面积快速测绘的先进航测方案。

2. 支持环扫毫米波雷达
新增支持环扫毫米波雷达避障配件。在环扫毫米波雷达的加持下,经纬 M300 RTK 将拥有更强大的避障能力,对于高压线、树枝这类细小的、视觉系统难以捕捉的障碍物,也能准确识别。在夜间飞行这类视觉无法生效的场景,毫米波雷达依然能够发挥作用,提升飞行作业安全。

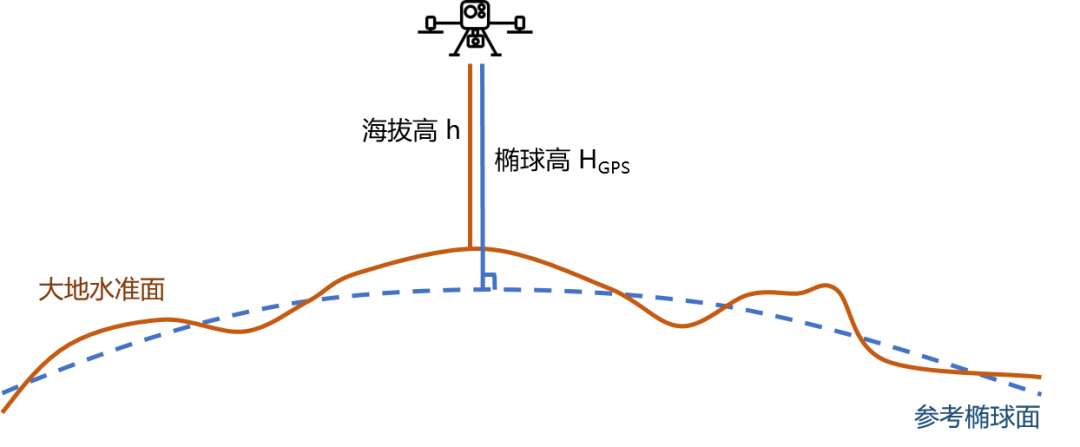
3. 显示海拔高
在手动飞行和航线规划时,飞行器和 RNG 点的绝对高度显示(ASL)从椭球高修改为海拔高(使用 EGM96 模型),以便与常用海拔高度对应。
飞行界面
在经纬 M300 RTK的相机画面和 FPV 画面中,ASL 处显示的数值为无人机的海拔高度。在 RNG 的位置显示的数值为激光测距点的海拔高度。

航线规划
如果在航线规划时选择高度模式为“海拔高度”,在经纬 M300 RTK 的航线规划界面,可以直接设定每个航点/整条航线的海拔高度,Pilot App 也会同时显示该点对应的椭球高。为了与历史固件版本以及其他产品兼容,航线 KML 文件中依然保存的是航线/航点的椭球高度。

RTK 设置
在 RTK 设置页面,Pilot App 会显示飞行器和 D-RTK 2 移动站的椭球高。在 RTK 高级设置中,用户也可以输入 D-RTK 2 移动站的椭球高。

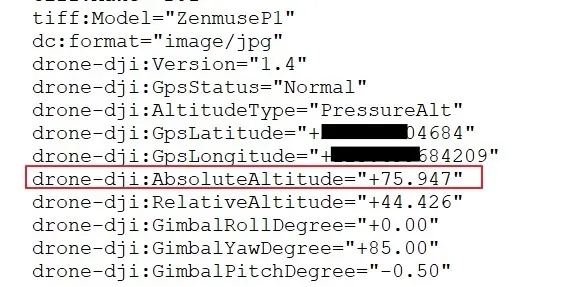
照片信息
在经纬 M300 RTK 搭载禅思 H20 系列等负载拍摄的照片的 EXIF 和 XMP 信息中,AbsoluteAltitude 表示的是拍摄时的无人机所处位置的椭球高,以便用户将照片导入 DJI Terra 等进行二维、三维建模。
注:经纬 M300 RTK 使用的海拔高度参考的是 EGM96 模型。
4. 优化航线任务
(1) 建图航拍任务新增仿地飞行功能,用户可以导入包含地表高度信息的 DSM 文件实现仿地飞行;
(2) 在执行建图航拍、倾斜摄影和航带飞行这些航线任务时,遥控器拍照、录像按键操作将失效,避免误操作;
(3) 航线规划时,相机列表新增 H20 系列的红外相机和 PSDK 102S 相机选项;
(4) 增加航线任务暂停时具体原因的文案说明;
(5) 优化航线任务照片漏拍问题;
(6) 优化云台角度控制,增加重试机制,提升成功率;
(7) 修复航点飞行、建图航拍、倾斜摄影、航带飞行模式下,云台偏航角异常转动的问题;
(8) 修复偶现最后一个航点动作不执行的问题;
(9) 修复偶现结束航线任务后无法自动退出航线的问题。
5. 优化返航功能
(1) 返航高度默认值修改为 100 米;
(2) 返航水平最高飞行速度修改为 15m/s;
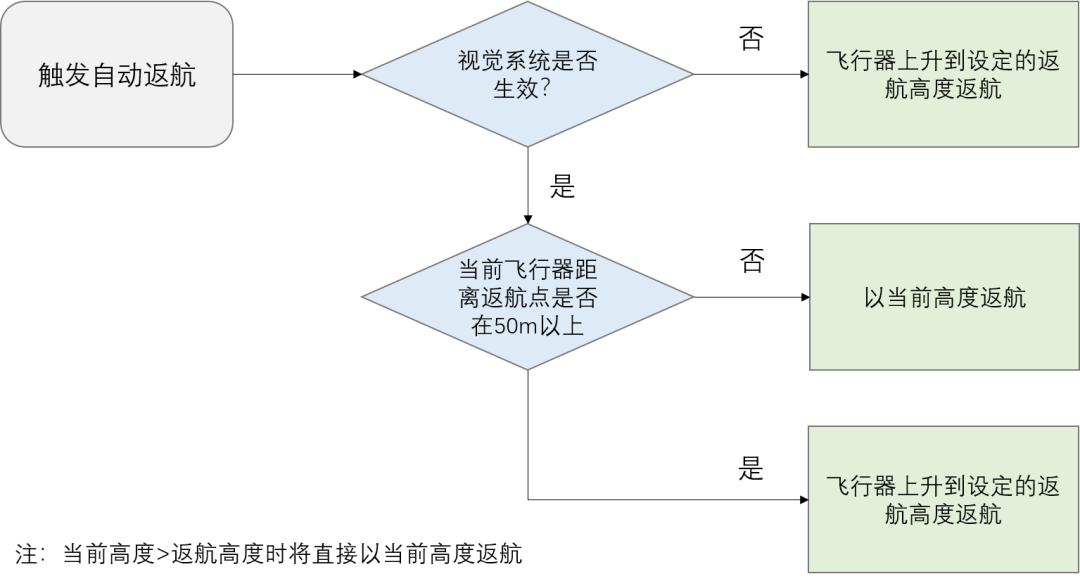
(3) 返航逻辑变更:
A. 视觉系统工作时:距离返航点 50 米内触发返航,将以当前高度返航。距离返航点 50 米以上触发返航,将以返航高度返航;若飞行器高于返航高度,将以当前高度返航。
B. 视觉系统失效时:将以返航高度返航;若飞行器高于返航高度,将以当前高度返航。
6. 新增遥控器电量低于 10% 时禁止起飞的限制。
7. 新增遥控器录制屏幕时录制声音功能。
固件信息
飞行器固件:v02.02.01.02
遥控器固件:v02.02.01.02
Pilot App Android版本:v2.2.1.7
D-RTK 2移动站经纬版: v03.00.00.16(D-RTK 2移动站:v02.02.0505)
智能电池箱:v01.05.06.07
电池固件:v01.02.05.30
Zenmuse H20/H20T:v02.02.01.00
Zenmuse P1:v02.02.01.00
Zenmuse Z30: v01.00.07.10
Zenmuse XT2:v01.00.03.50
Zenmuse XT S:v01.00.00.09
DJI X-Port:v01.03.02.00
DJI Skyport:v01.04.00.00
DJI Skyport V2:v01.03.02.00
DJI Assistant 2 For Matrice:v2.0.13

